24小时咨询电话:







S-HNLS 非接触式雷达流速仪 多普勒效应原理

- 产品介绍
- 参数特性
- 相关下载
- 应用方案
1产品介绍
雷达流速仪是一款非接触式雷达流速测量设备,可有效监测各种渠道、天然河道的水流表面流速。该产品易安装维护,操作简单。广泛适用于水文、防汛排涝、环保排污监测等领域,实现 7x24 小时在线监测。1.1工作原理
雷达流速仪采用多普勒效应原理测量流体表面流速。当雷达发射的电磁波与接收体(即探头和反射体)之间有相对运动时,回波的频率将有所变化,此种频率的变化称之为频移,即多普勒效应。

如图 1-1 所示,当雷达流速仪与水体以相对速度 V 发生对运动时,雷达流速仪所收到的电磁波频率与雷达自身所发出的电磁波频率有所不同,此频率差称为多普勒频移。通过计算多普勒频移与 V 的关系,得到流体表面流速。
图 1-1 雷达流速仪测流速示意图
应用 K、Ka 频段雷达波探测流体流速的技术难点在于低速段的测量。当流体流速比较缓慢时,雷达波在平静的水面上形成镜面反射,雷达流速仪几乎接收不到反射回来的电磁波信号,因此国内外多数同类产品的流速下限通常在 0.3
m/s 以上。采用拥有自主知识产权的测流控制算法和检测微弱目标的雷达天线研制生产的雷达流速仪,可检测到 0.1m/s 以上的表面流速。
2性能指标
| 序号 | 参数 | 范围 | 备注 |
| 1 | 工作频率 | 24GHz | |
| 2 | 测速范围 | 0.1~20m/s | 与流态有关 |
| 3 | 测速精度 | ±0.01m/s ;±1%FS | |
| 4 | 波束角度 | 12° | |
| 5 | 俯仰角 | 30~70° | 建议 55°左右;横滚角建议<±2° |
| 6 | 自动俯仰角补偿 | 精度±0.5°,分辨率 0.1° | |
| 7 | 供电电源 | DC6~30V | 建议 DC12V |
| 8 | 功耗 |
工作电流:<40mA 待机电流:<5mA |
@DC12V |
| 9 | 通讯方式 | RS485,MODBUS 协议 | 可自定义协议 |
| 10 | 波特率 | 9600~115200bps | |
| 11 | 工作温度 | -40~80℃ | |
| 12 | 防护等级 | IP68 | |
| 13 | 重量 | 0.45kg | |
| 14 | 尺寸 | 105*105*60mm |
3安装说明
3.1外观及结构定义
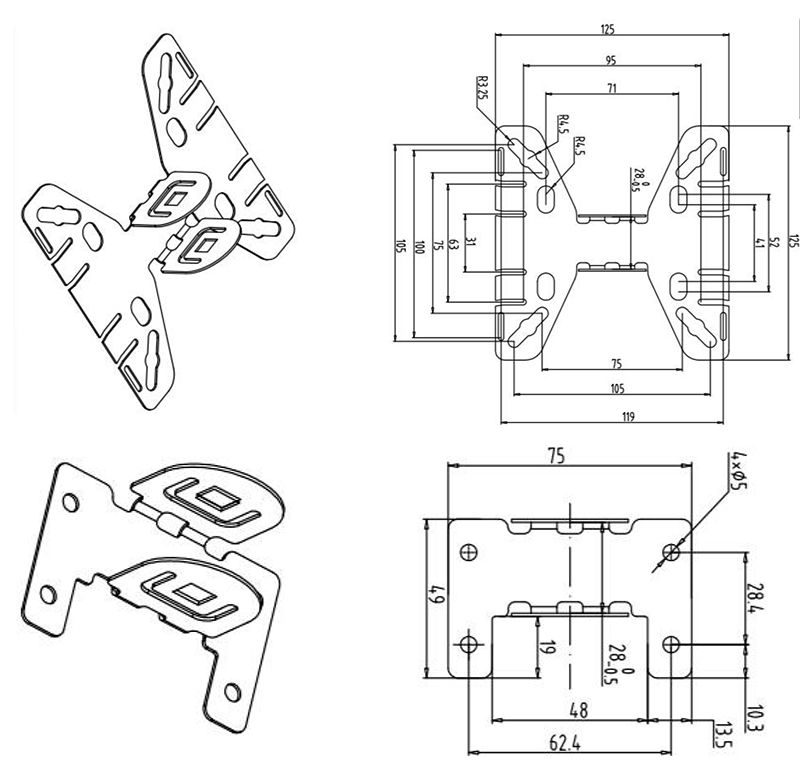
产品外观结构尺寸如图 3-1~3-3 所示。其中图 3-3 中的红色圈标注的是安装定位螺丝孔。


图 3-1 正视图 图 3-2 侧视图
3.2安装支架
可选配安装支架如图 3-4 所示,安装支架尺寸如图 3-5 所示。
图 3-4 安装支架示意图
3.3电气接口
接线端子通讯线缆插头配红色标记内的插座。
雷达流速仪通过 RS485 接口与上位机通讯,RS485 电源/通讯电缆定义如图
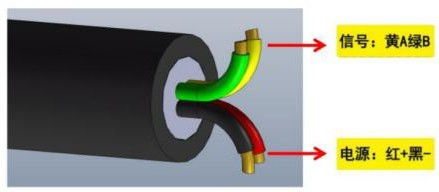
3-7 所示。
图 3-7 通讯线缆
接线端子与通讯电缆对应电气连接定义及功能描述见表 3-1。
表 3-1 接线电气定义及功能描述
注:雷达流速仪对外标准接口为 RS485。用户如需选择不同的接口,如 RS232、以太网接口等,请与厂家联系。
接线端子通讯线缆插头配红色标记内的插座。
雷达流速仪通过 RS485 接口与上位机通讯,RS485 电源/通讯电缆定义如图
3-7 所示。
图 3-7 通讯线缆
接线端子与通讯电缆对应电气连接定义及功能描述见表 3-1。
表 3-1 接线电气定义及功能描述
|
接线端子 编号 |
通讯电缆 标签 |
功能名称 | 描述 |
| 1 | 正极 | VCC | 直流电源正极 |
| 4 | 负极 | GND | 直流电源负极 |
| 3 | A | A(D+) | RS485 数据 |
| 2 | B | B(D-) | RS485 数据 |
3.4测点选择
为了得到较高精度,雷达流速仪安装点应处于水面平缓稳定、没有回流和漩涡、无障碍物、处于测量范围内等环境下。排水口、垂直跌水、挡流板、河道(管道)弯曲或结合处等情况都将影响到测量精度,断面选择注意事项如图 3-8~图3-12 所示。

注:α:为拐弯角度; L:为安装位置距离拐点的距离;DN:水面宽度;V:流速 m/s。
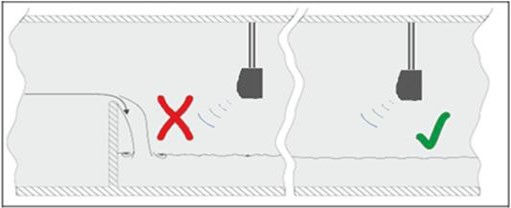
注:×=错误!不定的水流条件;√=保持足够的距离得到稳定的水流。 安装位置距离拐点至少 10 倍 DN(DN:水面宽度)
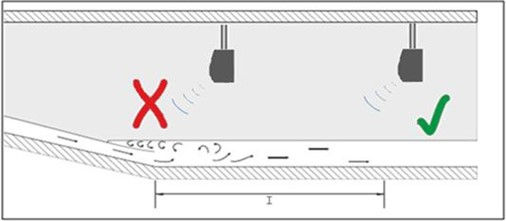
图 3-10 斜坡后的安装位置注:×=错误!不定的水流条件;√=水流平缓稳定。安装位置距离拐点至少 10 倍 DN(DN:水面宽度)
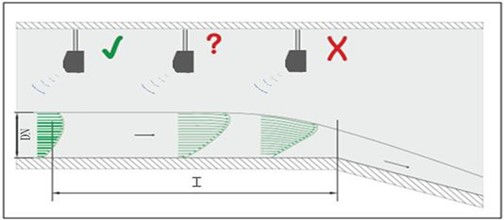
注:×=错误!水流喷发段;? = 危险的测量点,不推荐;√=水流平缓稳定。安装位置距离拐点至少 5--10 倍 DN(DN:水面宽度)。
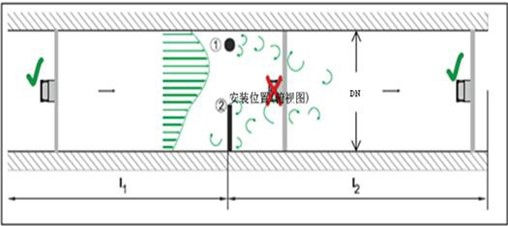
注:×=安装位置错误(涡旋会严重影响测量精度);√=合适的安装位置。
①单点固定物;②挡流板;③DN:水面宽度;④上游安装位置 L1 距挡流板至少 5 倍
DN;⑤下游安装位置 L2 距挡流板至少 10 倍 DN。
3.5安装角度与高度
请注意流速仪的安装方向。首先确认电缆插座在流速仪下方,产品铭牌在上方。需尽量保证雷达流速仪发射的雷达波与水面间的夹角(即配置软件上显示的
“俯仰角”)在 50°- 60°之间,建议 55°左右,以保证测量的精度,横滚角在±2° 以内。一般情况下,建议流速仪迎水安装,如下图 3-13 所示。
需尽量使安装完成后发射的雷达波全部照射到水面,以保证测量精度。 为雷达流速仪发射的雷达波照射于水面示意图及比例说明。
假定雷达流速仪安装的空高为 h(单位:米),俯仰角为 55°,雷达流速仪发射的雷达波照射到水面形成椭圆长轴为 b(单位:米),短轴为 a(单位: 米),则有:
0.315
» a
安装时需根据现场环境,按照上述计算公式调整安装的空高,以确保雷达流速仪发射的雷达波全部照射到水面。
附空高与波束照射区域长轴短轴长度值对应表如下:
表 3-2 空高与波束照射区域长轴短轴长度
立杆安装和桥上安装效果示意分别如图 3-15,3-16 所示。
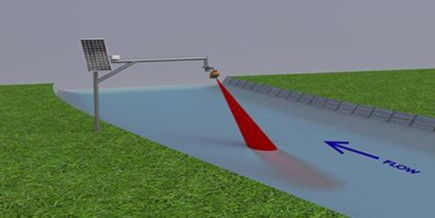
图 3-15 立杆安装效果示意图
附空高与波束照射区域长轴短轴长度值对应表如下:
表 3-2 空高与波束照射区域长轴短轴长度
| 空高 h(m) | 照射区域长轴 b(m) | 照射区域短轴 a(m) |
| 2 | 0.63 | 0.51 |
| 4 | 1.26 | 1.03 |
| 6 | 1.89 | 1.54 |
| 8 | 2.52 | 2.06 |
| 10 | 3.15 | 2.57 |
| 15 | 4.73 | 3.86 |
| 20 | 6.30 | 5.14 |
| 25 | 7.88 | 6.43 |
| 30 | 9.45 | 7.71 |
3.6安装示意图
立杆安装和桥上安装效果示意分别如图 3-15,3-16 所示。
图 3-15 立杆安装效果示意图
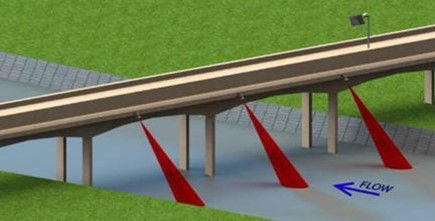
图 3-16 桥上安装效果示意图
4产品配置
4.1设备连接与设置
 产品通过通讯电缆及 485 转 USB 接口与电脑连接,并连接电源,如图 4-1 所示
产品通过通讯电缆及 485 转 USB 接口与电脑连接,并连接电源,如图 4-1 所示打开 HZRadar 软件,进入软件配置主界面。“通讯端口”自动显示,如未显示请检查电脑串口是否被占用。点击“连接”按键。连接成功后产品信息显示及功能按键将激活。
4.2配置主界面介绍
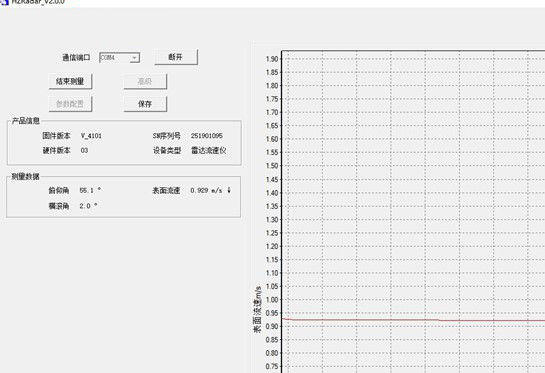
软件配置主界面如图 4-3 所示。
界面左上方功能按键包括“开始测量”“固件升级”“参数配置”“保存”和“高级”; 界面左下方显示“产品信息”和“测量数据”;右侧显示表面流速的过程曲线。其中
“产品信息”中显示固件及硬件版本,SN 序列号,及设备类型。

4.3设备参数设置
点击配置主界面的“设置参数”按键,如图 4-4 所示,在弹出的对话框可修改设备的“地址”和“波特率”等参数。
图 4-4 设备参数设置示意图

- 波特率=9600
- 俯仰角补偿,水平角补偿均为 0
- 地址=0x34
- 灵敏度=中
- 方向滤波=滤除负流
4.4测量值实时显示
点击配置主界面“开始测量”按键,可查看设备测量值信息,包括 “俯仰角”、
“横滚角”、 “表面流速”的实时信息。界面右侧展示表面流速对时间的过程曲线。
4.5数据保存
雷达流速仪处于工作状态时,才能进行数据保存。数据保存步骤如下:
- 点击“保存”按钮,选择保存文件的路径及文件名,保存成 EXCEL 表。
- 点击“停止保存”按钮结束数据保存。
-
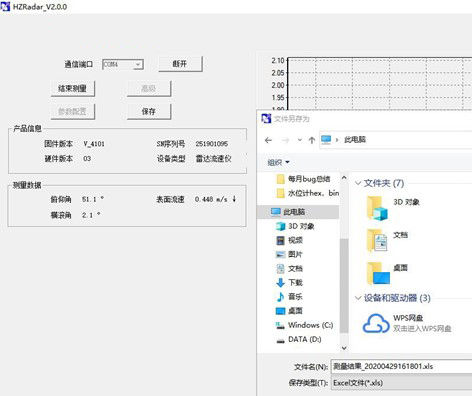

图 4-7 EXCEL 数据表
 |
保存功能只能在点击“开始测量”按钮后才能进行数据保存。 |
|
|
查看 EXCEL 表期间,测量数据不进行保存。 |
5发货清单
表 5-1 发货清单
表 5-1 发货清单
| 序号 | 名称 | 数量 | 单位 | 备注 |
| 1 | 雷达流速仪 | 1 | 台 | |
| 2 | 万向支架 | 1 | 套 | |
| 3 | 电缆 | 1 | 根 | 标配 10m(可定制) |
| 4 | 合格证,保修卡 | 1 | 张 | |
| 5 | 用户手册 | 1 | 册 | 以邮件的方式发送 |
| 6 | 上位机软件 | 1 | 套 |
6常见问题及解决办法
1.雷达流速仪与上位机软件无法正常通讯
- 检查线路连接是否正常,即电源和 RS485 是否按照要求正确连接, 有无接错现象;
- 检查电源是否正常:供电电源应符合 DC6~30V,建议 DC12V;
- 检查 COM 设置和波特率设置是否正确,是否已点击“连接”键。
2.雷达流速仪测量数据为 0 或数据异常
- 检查设备是否掉电;
- 检查通讯是否正常;
- 检查水面是否流动,以及测量范围内水面上的漂浮物是否流动;
- 水面是否有漩涡,回流等情况。
- 确认安装俯仰角在 30°-70°之间,建议 55°左右
7通讯协议
注意,安装设备前请仔细阅读以下项目:- 本传感器两条数据帧之间时间间隔为 1s。
- MODBUS 协议中规定了广播地址——0 的相关内容,本传感器同样也能接受广播地址内容。
- 设备默认地址:0X34
- 设备默认波特率:9600
7.1数据帧格式
数据帧 10 位:1 个起始位,8 个数据位,1 个停止位,无校验。7.2读取部分
Modbus 协议中读取功能码为 03H。7.2.1读取表面流速
| 主机查询命令: | 从机响应: | |||
| 传感器地址 | 34H | 传感器地址 | 34H | |
| 功能码 | 03H | 功能码 | 03H | |
|
访问寄存器 首地址 |
00H | 数据字节总数 | 04H | |
| 0FH | 表面流速数据 | 寄存器1 高 8 位 | XXH | |
| 寄存器数量 | 00H | 寄存器1 低 8 位 | XXH | |
| 02H | 寄存器2 高 8 位 | XXH | ||
| CRC | F1ADH | 寄存器2 低 8 位 | XXH | |
| CRC | CRC LH | |||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
7.2.2读取流速方向
| 主机查询命令: | 从机响应: | |||
| 传感器地址 | 34H | 传感器地址 | 34H | |
| 功能码 | 03H | 功能码 | 03H | |
|
访问寄存器 首地址 |
00H | 数据字节总数 | 02H | |
| 0CH |
流速方 向数据 |
寄存器高 8 位 | XXH | |
| 寄存器数量 | 00H | 寄存器低 8 位 | XXH | |
| 01H | CRC | CRC LH | ||
| CRC | 41ACH | |||
|
命令应用举例 |
|||||||||||||
|
主机发送 |
34 |
03 |
00 |
0C |
00 |
01 |
41 |
AC |
|||||
|
从机回复 |
34 |
03 |
02 |
00 |
01 |
F5 |
80 |
||||||
| 说明:00 01 流速方向为迎水。若为 00 00 则流速方向为顺水 | |||||||||||||
7.2.3读取设备地址
| 主机查询命令: | 从机响应: | |||
| 传感器地址 | 00H | 传感器地址 | 34H | |
| 功能码 | 03H | 功能码 | 03H | |
|
访问寄存器 首地址 |
00H | 数据字节总数 | 02H | |
| 41H | 寄存器高 8 位 | 00H | 设备地址数据 | |
| 寄存器数量 | 00H | 寄存器低 8 位 | XXH | |
| 01H |
CRC |
CRC LH |
||
| CRC | D5CFH | |||
|
命令应用举例 |
||||||||||||||
|
主机发送 |
00 |
03 |
00 |
41 |
00 |
01 |
D5 |
CF |
||||||
|
从机回复 |
34 |
03 |
02 |
00 |
34 |
35 |
97 |
|||||||
| 说明:00 34;设备地址 34H(34H 代表 16 进制的 34,即十进制的 52) | ||||||||||||||
7.2.4读取波特率
| 主机查询命令: | 从机响应: | |||
| 传感器地址 | 34H | 传感器地址 | 34H | |
| 功能码 | 03H | 功能码 | 03H | |
| 访问寄存器首地址 | 00H | 数据字节总数 | 02H | |
| 04H | 寄存器高 8 位 | 00H | 波特率数据 | |
| 寄存器数量 | 00H | 寄存器低 8 位 | XX | |
| 01H |
CRC |
CRC LH |
||
| CRC | 807BH | |||
|
命令应用举例 |
||||||||||||||
|
主机发送 |
34 |
03 |
00 |
40 |
00 |
01 |
80 |
7B |
||||||
|
从机回复 |
34 |
03 |
02 |
00 |
00 |
34 |
40 |
|||||||
|
说明:00 00 对应 9600 波特率 |
||||||||||||||
7.2.5读取横滚角
| 主机查询命令: | 从机响应: | |||
| 传感器地址 | 34H | 传感器地址 | 34H | |
| 功能码 | 03H | 功能码 | 03H | |
|
访问寄存器 首地址 |
00H | 数据字节总数 | 02H | |
| 09H | 寄存器高 8 位 | XXH |
横滚角 数据 |
|
| 寄存器数量 | 00H | 寄存器低 8 位 | XXH | |
| 01H |
CRC |
CRC LH |
||
| CRC | 51ADH | |||
|
命令应用举例 |
||||||||||||||
|
主机发送 |
34 |
03 |
00 |
09 |
00 |
01 |
51 |
AD |
||||||
|
从机回复 |
34 |
03 |
02 |
00 |
1F |
75 |
88 |
|||||||
|
说明:00 1F;横滚角 31(真实横滚角:寄存器值除以 10,为 3.1°) |
||||||||||||||
7.2.6读取俯仰角
| 主机查询命令: | 从机响应: | |||
| 传感器地址 | 34H | 传感器地址 | 34H | |
| 功能码 | 03H | 功能码 | 03H | |
|
访问寄存器 首地址 |
00H | 数据字节总数 | 02H | |
| 0AH | 寄存器高 8 位 | XXH |
俯仰角 数据 |
|
| 寄存器数量 | 00H | 寄存器低 8 位 | XXH | |
| 01H |
CRC |
CRC LH |
||
| CRC | A1ADH | |||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
7.3设置部分
Modbus 协议中设置功能码为 10H。
7.3.1设置流速方向滤波
| 主机设置命令: | 从机响应: | ||
| 传感器地址 | 34H | 传感器地址 | 34H |
| 功能码 | 10H | 功能码 | 10H |
|
寄存器 地址 |
00H |
寄存器 地址 |
00H |
| 5EH | 5EH | ||
|
寄存器 数量 |
00H |
寄存器 数量 |
00H |
| 01H | 01H | ||
| 数据字节总数 | 02H | 数据字节总数 | 02H |
| 流速方向滤除 | XXH | 流速方向滤除 | XXH |
| XXH | XXH | ||
| CRC | CRC LH | CRC | CRC LH |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
7.3.2设置灵敏度
| 主机设置命令: | 从机响应: | ||
| 传感器地址 | 34H | 传感器地址 | 34H |
| 功能码 | 10H | 功能码 | 10H |
|
寄存器 地址 |
00H |
寄存器 地址 |
00H |
| 51H | 51H | ||
|
寄存器 数量 |
00H |
寄存器 数量 |
00H |
| 01H | 01H | ||
| 数据字节总数 | 02H | 数据字节总数 | 02H |
| 灵敏度 | XXH | 灵敏度 | XXH |
| XXH | XXH | ||
| CRC | CRC LH | CRC | CRC LH |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
7.3.3设置最大流速限制
| 主机设置命令: | 从机响应: | ||
| 传感器地址 | 34H | 传感器地址 | 34H |
| 功能码 | 10H | 功能码 | 10H |
| 寄存器 | 00H | 寄存器 | 00H |
| 地址 | 5FH | 地址 | 5FH |
|
寄存器 数量 |
00H |
寄存器 数量 |
00H |
| 02H | 02H | ||
| 数据字节总数 | 04H | 数据字节总数 | 04H |
| 最大流速限制 | XXH | 最大流速限制 | XXH |
| XXH | XXH | ||
| XXH | XXH | ||
| XXH | XXH | ||
| CRC | CRC LH | CRC | CRC LH |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
7.3.4设置设备地址
| 主机设置命令: | 从机响应: | ||
| 传感器地址 | 34H | 传感器地址 | 34H |
| 功能码 | 10H | 功能码 | 10H |
|
寄存器 地址 |
00H |
寄存器 地址 |
00H |
| 41H | 41H | ||
|
寄存器 数量 |
00H |
寄存器 数量 |
00H |
| 01H | 01H | ||
| 数据字节总数 | 02H | 数据字节总数 | 02H |
| 设备地址 | 00H | 设备地址 | 00H |
| XX | XX | ||
| CRC | CRC LH | CRC | CRC LH |
|
命令应用举例 |
|||||||||||
|
主机发送 |
34 |
10 |
00 |
41 |
00 |
01 |
02 |
00 |
35 |
02 |
07 |
|
从机回复 |
34 |
10 |
00 |
41 |
00 |
01 |
02 |
00 |
35 |
02 |
07 |
| 说明:00 35;设备地址设置为 35H(35H 代表 16 进制的 35,即十进制的 53)。 | |||||||||||
7.3.5设置波特率
| 主机设置命令: | 从机响应: | ||
| 传感器地址 | 34H | 传感器地址 | 34H |
| 功能码 | 10H | 功能码 | 10H |
|
寄存器 地址 |
00H |
寄存器 地址 |
00H |
| 40H | 40H | ||
|
寄存器 数量 |
00H |
寄存器 数量 |
00H |
| 01H | 01H | ||
| 数据字节总数 | 02H | 数据字节总数 | 02H |
| 波特率 | 00H | 波特率 | 00H |
| XX | XX | ||
| CRC | CRC LH | CRC | CRC LH |
容与设置一致。
|
命令应用举例 |
|||||||||||
|
主机发送 |
34 |
10 |
00 |
40 |
00 |
01 |
02 |
00 |
01 |
02 |
01 |
|
从机回复 |
34 |
10 |
00 |
40 |
00 |
01 |
02 |
00 |
01 |
02 |
01 |
| 说明:00 01 对应 19200 波特率。 | |||||||||||
应用方案

我国面临气候变迁、水资源丰枯日渐悬殊及各用水标的竞用等重大课题,致使灌溉管理工作日渐困难且复杂,在水资源开发不... ...

水族箱漏水的原因主要分为两类。一种是展览水族箱上连接的用于净化水箱内水的“过滤箱”出现管道堵塞或停电的情况。过... ...

该系统为驾驶员提供道路、天气状况等准确的道路交通信息,支持安全、平稳驾驶。为驾驶员提供交通拥堵、法规、警告和天... ...

该系统通过传输河流信息、天气信息、咨询和警报来支持防灾活动。该系统快速传输水位、天气信息、警报以及天气信息发布... ...

我们提出了[斜坡监测系统]作为维护和管理方法,以确保使用更安全、更有保障。系统详细内容如下 :安装测斜仪(测量地面... ...

作为水库防灾措施,该系统可实现高效且廉价的远程监控。全国约有15万座水库,主要用于农业用途,但近年来,由于暴雨和... ...

流域防洪措施的各种系统和功能下面列出了该公司可以提供的各种系统的示例。...... ...

当降雨量超过每小时50毫米时,污水无法及时排出,水会溢出到道路上,淹没地下。该系统安装在地下或停车场入口处,当水... ...

近年来,局部短时间强降雨造成的损害和事故几乎每年都会发生。研究表明,由于全球气候变化,未来此类暴雨可能会增加。... ...

什么是河流监控摄像机? 河流监控摄像机是在台风或暴雨期间可以实时监测河流水位和泥沙堆积情况的摄像机。这使得快速... ...
样机申请
17850532774

-
全国服务电话:0592-3564822
Copyright © 2021 厦门欣仰邦科技有限公司 版权所有
地址:厦门市集美区软件园三期B区04栋